
Advancing Autonomous Driving Simulation
Goals:
- Strengthen the Autoware open-source autonomous driving ecosystem
- Improve simulation-to-reality validation for perception and planning modules
- Enhance 3D environment models for real-world Japanese cities
- Develop explainable AI tools for comparing synthetic vs. real sensor data
- Expand AWSIM simulator capabilities for large-scale scenario testing
Case Study: Autonomous driving, Japan
Customer: Tier IV
Challenge
Tier IV, a global leader in open-source autonomous driving (Autoware), needed to expand its simulation capabilities to ensure safer, more reliable deployment of self-driving systems. Key challenges included:
- Bridging the gap between synthetic and real-world sensor data
- Enhancing the realism of LiDAR and camera simulations
- Developing large, complex city-scale 3D models for testing autonomous systems
- Validating that simulation test cases aligned with intended scenarios
- Reducing costs and risks of real-world road testing while scaling autonomous development
Solution
Robotec.ai partnered with Tier IV to deliver end-to-end enhancements across simulation environments and testing workflows:
- 3D Model Development: Expanded and refined high-fidelity maps (e.g., Hiratsuka) for testing in Japanese driving environments.
- Sensor Validation: Conducted camera and LiDAR comparisons, sim-vs-real experiments, and new weather condition modeling (rain, snow, fog).
- Simulation Infrastructure: Supported AWSIM and DSL simulator development, including binary testing integration and cluster execution research with Unity.
- Explainable AI Research: Developed metrics, heat maps, and classifiers for assessing the realism of synthetic vs. real-world data (Explainable AI).
- Scenario Testing: Fixed and extended scenarios simulator This work enabled Tier IV to validate Autoware modules against realistic, large-scale simulations — critical for deployment readiness.
Results
The Robotec.ai + Tier IV collaboration delivered:
- Enhanced simulation realism with advanced weather, lighting, and pedestrian modeling
- Improved validation accuracy via sim-vs-real experiments and explainable AI metrics
- Robust testing frameworks with scenario validation, unit testing, and rosbag analysis
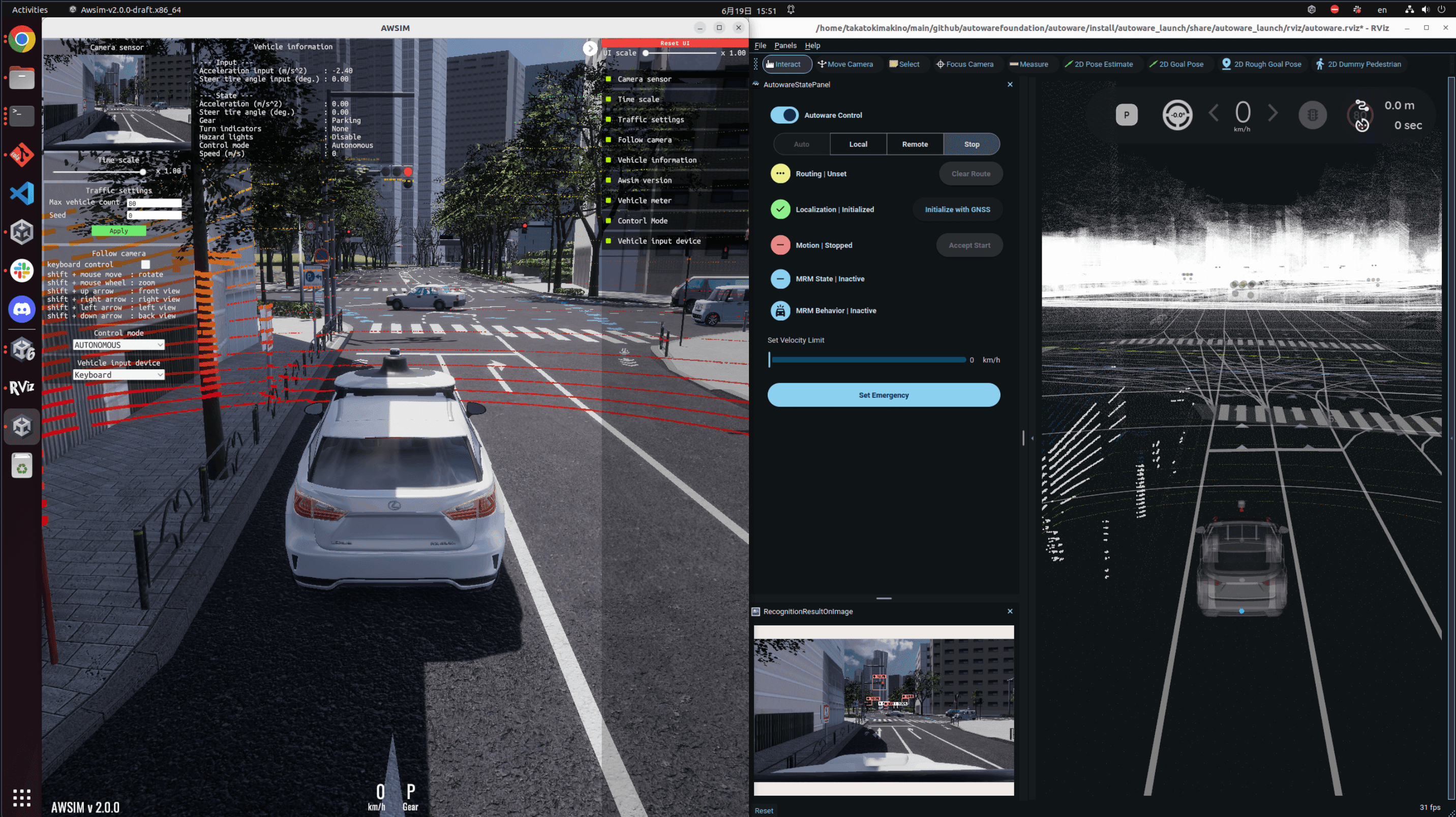
- Accelerated development of Autoware-compatible simulators (AWSIM)
- Safer and cheaper development cycles, reducing dependence on costly road tests
This partnership strengthens the Autoware ecosystem and helps bring autonomous driving technology closer to wide-scale, real-world adoption.