Enter the search phrase
Author: Adam Dąbrowski
We are pleased to announce a full open-source release of our ROS2 For Unity (R2FU) under Apache 2.0 license. As the name implies, the project brings together ROS2 ecosystem and simulations in Unity3D. While there are some other bridging solutions available, R2FU is meant for users who care about performance and high-speed simulation, especially with large data throughputs which are usual in automotive simulations. R2FU does not require additional endpoint and talks directly with other ROS 2 nodes, respecting your choice of DDS implementation (between CycloneDDS and FastRTPS) as well as Quality of Service settings of subscriptions and publishers.
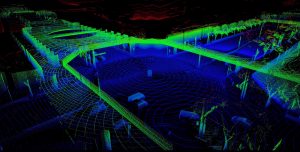
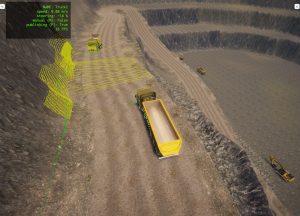
Using R2FU you can simulate a fleet of vehicles or robots equipped with a variety of sensors. It allows your ROS2 packages to receive the simulated data with lower latencies, keeping frequency and behaving better overall with high throughputs than any other solution we know of.
 |
 |
|---|
Since our first blog post, R2FU was in development driven by the requirements of our customers. The cooperation between Robotec.ai and Tier IV was crucial for the release. Tier IV is one of the leaders in autonomous driving technology in the power of open source to solve complex problems through cooperation. Tier IV leads the development of Autoware, an open-source, ROS2-based stack for self-driving mobility. Thanks to their contribution of encouragement, support, and requirements, R2FU was significantly improved in terms of portability, stability, core structure, and user-friendliness.
R2FU works as a self-contained Asset and can be used with Unity3D 2021.1.7f on Ubuntu 20.04 as well as Windows 10 (note that it might work with other versions , but these are the officially supported release targets). You can build your own version of Asset from source; adding custom messages is well supported and straightforward. You can also use one of our published releases which already include a broad set of standard ROS 2 messages. ROS 2 Foxy and Galactic are both supported. R2FU on Windows can be used without any dependencies, as the so-called standalone version, where all the necessary libraries are shipped with the Asset.
 |
 |
|---|
To start working with R2FU, follow the README instructions. It is best to start with one of our releases. Your feedback and contributions are welcome!
Source of graphics: Robotec.ai