Services
Robotics
Interior sensing
AI/Machine Learning
Case studies
Robotics
Interior sensing
AI/Machine Learning
Products
–
Post Type Description
RoSi Simulation Platform
Standalone Simulation Modules
Blog
Free handbook
Careers
Contact
Services
Robotics
Interior sensing
AI/Machine Learning
Case studies
Robotics
Interior sensing
AI/Machine Learning
Products
RoSi Simulation Platform
Standalone Simulation Modules
Blog
Free handbook
Careers
Contact
Enter the search phrase
All
Robotics
Mining simulation
Interior sensing
Artificial Intelligence
Jan 31, 2024 -
Robotics
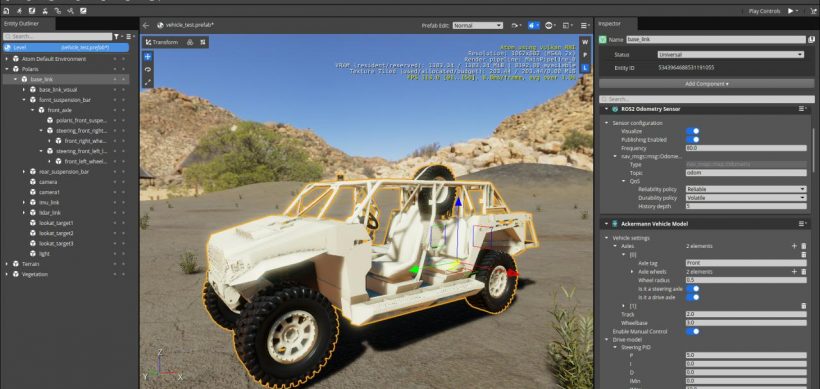
Open 3D Engine (O3DE): Off-Road Vehicle Simulation in Desert Conditions
Jan 10, 2024 -
Robotics
Simulation challenges in AgriTech
Nov 22, 2023 -
Robotics
Developers Share: How we built a simulation of 36 robots in Open 3D Engine (O3DE)
Oct 17, 2023 -
Robotics
How to start your first simulation project in Open 3D Engine (O3DE)?
1
2
3
4